

Now Reading: Decoding Sols 4541-4542: Boxwork or Box-Like Formation?
-
01
Decoding Sols 4541-4542: Boxwork or Box-Like Formation?
Quick Summary
- Date and Source: Report by Ashley Stroupe, Mission Operations Engineer at NASA’s Jet Propulsion laboratory, dated May 19, 2025. Earth planning date: May 14, 2025.
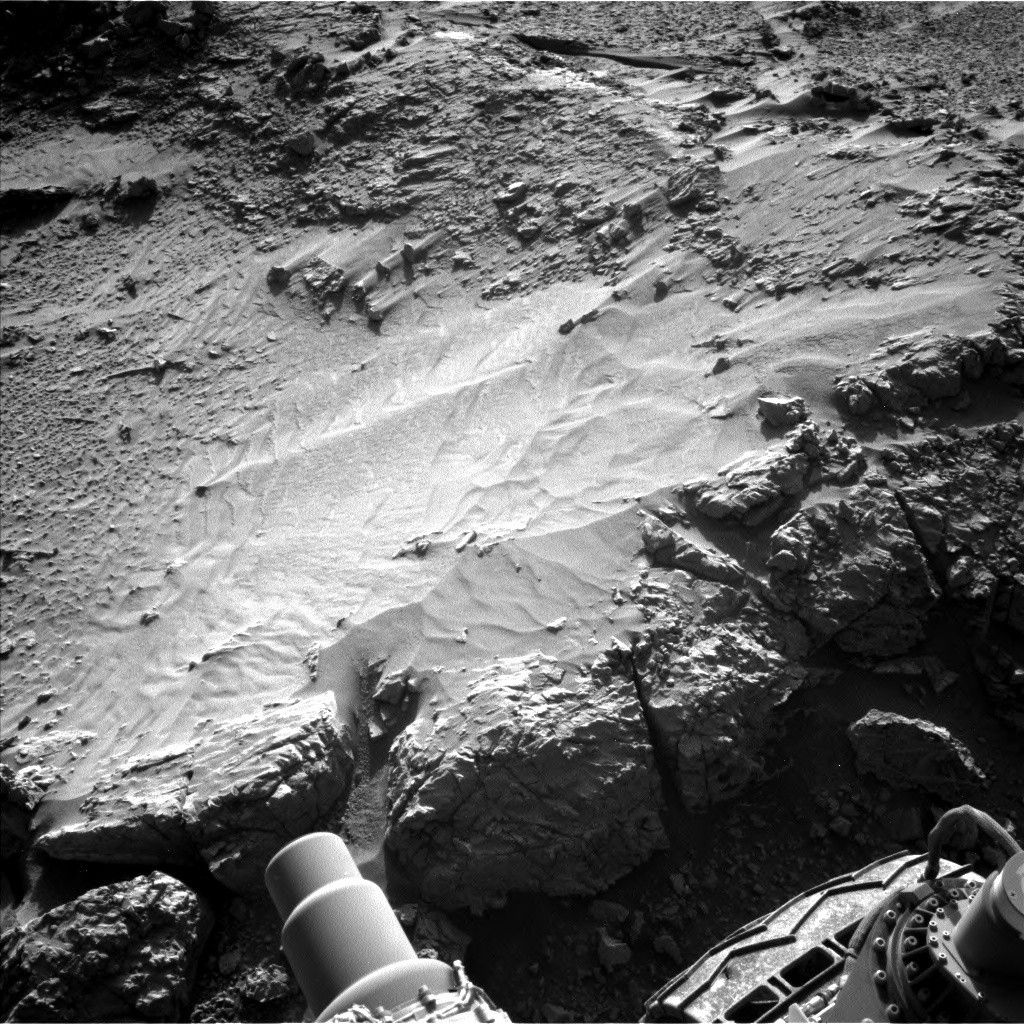
- Objective and Observations: Curiosity rover is at a potential “boxwork structure,” characterized by web-like ridges observed in orbital images. The rover cannot directly access targets safely due to one wheel perched on a pebble.
- Remote Sensing Activities:
– mastcam is creating a mosaic of surrounding terrain to document elevation changes.
– Imaging includes features like “Temblor Range,” troughs with uncertain origins, and other areas like Glendale Peak & Texoli Butte using ChemCam and Mastcam instruments.
- Heat Rejection System Maintenance: Monthly testing of the backup pump for temperature regulation in case the primary system fails functionally.
- Rover Movement Plan: Curiosity will reposition itself approximately 30 centimeters backward to safely unstow its arm for surface-level analysis later this week.
- Atmospheric Monitoring & Research:
– Dust-devil survey
– Navcam suprahorizon movie photography
– Solar tau measurements investigating atmospheric dust levels
Indian Opinion Analysis
NASA’s ongoing research examining Martian geological formations holds inspiring implications globally-possibly advancing our understanding of extraterrestrial environments that can influence theories about planetary evolution or signs of life beyond Earth. The investigation into boxwork structures is particularly intriguing as it could offer insights into complex environmental processes underlying Mars’ landscape.
For India,where space efforts are growing rapidly through ISRO programs such as Chandrayaan and Mangalyaan missions (Mars Orbiter Mission),this study reinforces the critical role long-term rover missions play in exploring outer planetary terrains systematically. India’s focus may increasingly shift toward developing similar technologies for deep-space autonomous exploration while benefiting from partnerships enriching scientific exchange on cutting-edge instrumentation advancements used aboard spacecraft worldwide.
Curiosity’s ability to handle maintenance autonomously amidst its scheduling demonstrates both resilience framework adaptability systems architectures factor significant-reaching bright This development bolsters goals durable interplanetary dry exploratory-align!








Related Posts
Stay Informed With the Latest & Most Important News
Previous Post
Next Post




Advertisement





